
“The Application of Fuzzy Control in Water Tank Level Using Arduino” başlıklı çalışma Fayçal CHABNI, Rachid TALEB, Abderrahmen BENBOUALI, Mohammed Amin BOUTHIBA tarafından yapılmış olup (IJACSA) International Journal of Advanced Computer Science and Applications dergisinin 2016 yılındaki 7.cildindeki 4.sayısında 261-265.sayfalarında basılmıştır.
Arduino kullanarak su tankı seviyesini bulanık olarak kontrol etme uygulaması
Sıvı seviyesi kontrolü sıvının yapısı, kontrol mekanizmasındakisürtünme gibi nedenlerden dolayı nonlineer bir problem olarak karşımıza çıkmaktadır. Endüstriyel olarak en yaygın kullanılan denetleyici PID’dir.
PID Nedir?
PID sık kullanılan geri besleme denetleyicisi yöntemidir.
PID(proportional,Integral,Derivative) oransal-integral-türevsel denetleyici PID kontrol döngüsü yöntemi , yaygın endüstriyel kontrol sistemlerinde kullanılan genel bir kontrol döngüsü geribildirim mekanizmasıdir. Bir PID denetleyici ölçülü bir süreç içinde değişen ve istenilen ayar noktası ile arasındaki farkı olarak bir “hata” değerini hesaplar. Kontrolör proses kontrol girişini ayarlayarak hatayı en aza indirerek istenilen ayar değerine ulaşmak için çalışır.
PID algoritması üç ayrı sabit parametreyi içerir ve buna göre bazen üç aşamalı kontrol denir: oransal, P ile gösterilir integral I ile gösterilir türev değerleri, D ile gösterilir
Sezgisel olarak, bu değerler mevcut değişim göz önüne alınarak zaman açısından şu şekilde yorumlanabilir; P mevcut hataya bağlıdır, I geçmiş hataların toplamı ve D gelecekteki hataların bir tahminidir.
Bu üç eylemin ağırlıklı toplamı yoluyla kontrol edilen süreç istenilen seviyeye ayarlamak için kullanılır. Böylece örnek olarak bir kontrol valfının pozisyonu ya da bir ısıtma elemanı çıkış gücü kontrol edilerek istenilen akış veya sıcaklık seviyesi en en düşük hata ile elde edilmeye çalışılır.
Geçmişte istatistik değerleri olmayan bir sürecin ve bilginin olmadığı durumlarda,PID denetleyici algoritması tarihsel olarak en iyi denetleyici olarak kabul edilmektedir. PID kontrol algoritması üç parametre ile , özel proseslerin gereksinimleri için kontrol eylemi sağlayabilir.Denetleyicinin tepkisi hatanın denetlenerek yanıtlanması olarak tarif edilebilir. , derecesi, kontrol sistemi ve istenen salınım derecesi aşma distorsiyonlarını için. Dikkat edilmesi gereken konu; PID algoritmasının kullanımı, sistemin veya sistem stabilizasyonunu optimal olarak edemeyeceğidir.
Bazı uygulamalarda, uygun bir sistem kontrolü sağlamak için sadece bir veya iki işlem kullanmak gerekebilir. Bu, diğer parametrelere sıfır değeri vererek elde edilebilir. Bu durumda PID, ilgili denetim eylemlerinin yokluğuna göre PI, PD, P veya I olarak tanımlanir.Türevsel eylem, ölçüm gürültüsüne hassas olduğundan PI kontrolörleri, oldukça yaygındır. Bir Integral öğesinin olmaması kontrol hareketi nedeniyle sistemin istenilen değere ulaşmasını engelleyebilir. [Kaynak: https://tr.wikipedia.org/wiki/PID]
Çalışmada hem PI (Proportional, Integral) hem de fuzzy logic denetleyiciler sisteme eklenmiştir. Bu iki denetleyici Arduino üzerinde çalıştırılmıştır.
Sistemin Tanımlanması

-Su tankı
-Sıvı seviyesi sensörü
-12 V ile çalışan bir su pompası
-DC/DC dönüştürücü güç kaynağı
-Arduino
Su tankı kontrol sisteminin yapısı

Arduino, RS232 üzerinden bilgisayarla haberleşmektedir.
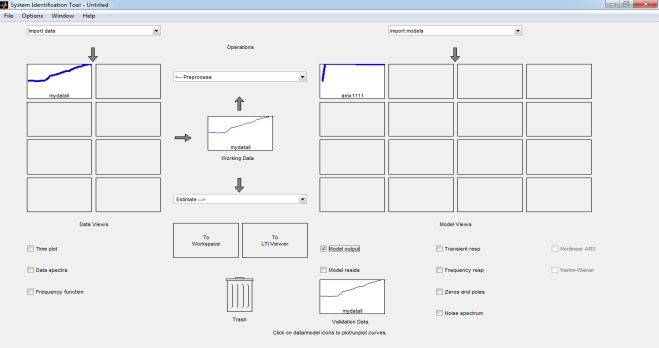
Sistem Tanımlama
Sistemin matematiksel modelini çıkarmak için “MATLAB identification toolbox” kullanılmıştır.
Bulanık Mantık Kullanımı
Girişler:
1-Sistem hatası(hata)
2-Hata sinyalinin değişimi(hatanın türevi)
Sistem tek çıkışlıdır.
Bulanık Mantık denetleyicisinin özellikleri aşağıdadır:
Controller type : Mamdani
And method : Min
Or method : Max
Implication :Min
Defuzzification :Centroid
Hem girişler hem de çıkış için aynı üyelik fonksiyonu kullanılmıştır:
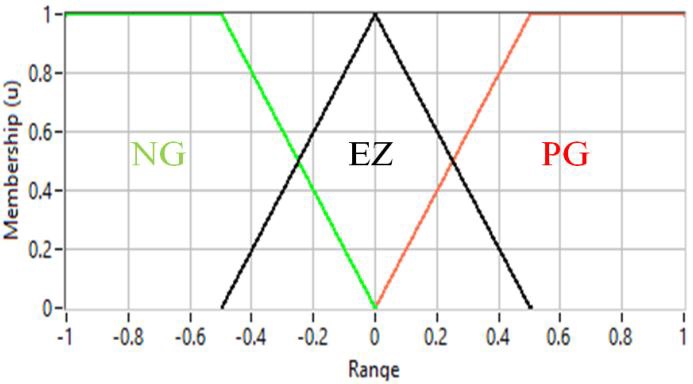
NG = very low
EZ = zero
PG = very high
Bulanık Mantık Kuralları:
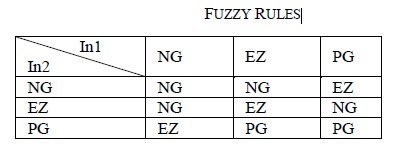
Hata büyükse hata oranı hızlı değişir ve sistem hata oranını sıfıra yaklaştırmak için hızlı çalışır, hata küçükse daha yavaş bir şekilde çalışır, hata sıfır ise değişim olmaz.
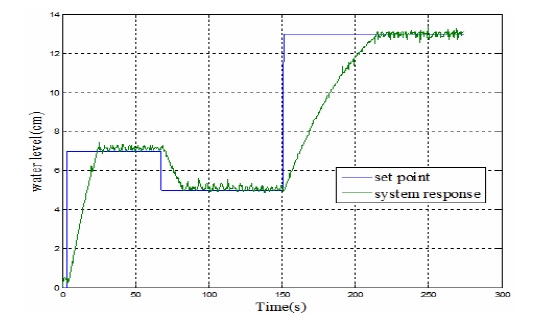
Sistemin çalışma grafiği(Simülasyon):

Sistemin çalışma grafiği(Deneysel):
Çalışmayı indirmek için:
the_application_of_fuzzy_control_in_water_tank_level_using_arduino
ASKON Konya’da MEVKA TeknoGirişim Girişimci-Yatırımcı Buluşmaları’na katıldım
ASKON Konya’nın MEVKA TeknoGirişim Girişimci-Yatırımcı Buluşmaları kapsamında 23 Ağustos 2023 Çarşamba günü ASKON Konya şubesinde>>>
Ağu
Matlab’da matrisin tüm elemanlarını belirli bir sayıdan nasıl çıkarırız?
Elimizde doğruluk oranlarının olduğu bir k matrisi olduğu varsayalım, bu matris içerisindeki tüm değerleri 1>>>
Şub
Matlab’ta iç içe döngüyle matris gezerek istediğimiz veriyi nasıl buluruz?
Başlık tam ifade eder mi bilmiyorum ama benim ihtiyacım olan şey 10 sütun, 1593 satıra>>>
Şub
A Review on Deep Learning-Based Methods Developed for Lung Cancer Diagnosis
Yüksek Lisans öğrencilerimden Türkan Beyza KARA’nın sunmuş olduğu “A Review on Deep Learning-Based Methods Developed>>>
Oca
İlk yabancı yazarlı ortak makalem yayınlandı
Birbirimizi hiç görmeden ve sesli olarak da hiç konuşmadan e-posta üzerinden tanışıp ortak bir çalışma>>>
4 Comments
Eki
Konya’da göz lazer ameliyatı oldum
25 yıldır takmakta olduğum ve kendisinden ayrılırken 6,5 numara olan gözlüğüme Konya’da göz lazer ameliyatımı>>>
Ağu
Tek kelimeyle beni nasıl tanımladılar?
YouTube üzerinden yapmış olduğum bir yoruma gelen yanıtta “…dürüst olun…” içeriğini görünce aklıma geçtiğimiz günlerde>>>
3 Comments
Ağu
Konya Akıllı Şehir HACKATHON’unda 3.olduk
Kısaca daha önceki yazımda bahsettiğim Konya Akıllı Şehir HACKATHON’unda 3.olduk. Selçuk Üniversitesi Teknoloji Fakültesi Bilgisayar>>>
1 Comment
May
Sentius ekibi olarak, Akıllı Şehir HACKATHON’una katıldık
Konya Akıllı Şehir HACKATHON’unda 3.olduk Konya Bilim Merkezi ile GDG Konya’nın düzenlediği Akıllı Şehir HACKATHON’una>>>
1 Comment
May
BİLMÖK 2022 için yazılmış gecikmiş bir yazı :)
Türkiye’nin en büyük öğrenci kongresi BİLMÖK 21-23 Mayıs 2022 günlerinde Konya’da Konya Teknik Üniversitesi’nin organizasyonuyla>>>
May
Genç Bakış Gazetesi’nden Beyzanur Polat’ın yaptığı haber…
Genç Bakış Gazetesi’nden Beyzanur Polat’ın yaptığı haber…>>>
Kas
Binary Sooty Tern Optimization Algorithms for solving Wind Turbine Placement Problem
Binary Sooty Tern Optimization Algorithms for solving Wind Turbine Placement Problem İndirmek için tıklayınız.>>>
Eyl
Konya Model Fabrika’yı Ziyaretim ve Konya Dijital Dönüşüm
“konya dijital dönüşüm” kelimesini Google üzerinden arattığım zaman Konya Model Fabrika‘yı keşfettim. 5 Ağustos 2021>>>
Ağu
Otomatlar, Biçimsel Diller ve Turing Makineleri – Dr. Emre Sermutlu – Cinius Yayınları
2020-2021 bahar yarıyılında Otomata Teorisi ve Biçimsel Diller dersini verirken kullanmam için Selçuk Üniversitesi Teknoloji>>>
Mar
4-6 MART 2021 ÇEVRİMİÇİ TÜBİTAK-2237-B PROJE EĞİTİMİ ETKİNLİĞİ KTÜ – TRABZON
Alanında dünyada öncü Prof. Dr. Yener EYÜBOĞLU, Prof. Dr. Asım KADIOĞLU, Prof. Dr. Nurettin YAYLI,>>>
Mar
ARDEB 1001 – 2020 Sonuçlarını Değerlendirme ve Yenilikler Toplantısı
>>>
Şub
2021 yılı içerisinde değerlendirilebilecek konferanslar
GLOBAL CONFERENCE on ENGINEERING RESEARCH online 2-5 June 2021 Abstract or Full Paper Submission: 2>>>
Şub
Sayfamda paylaştığım bütün Karikatürler silinmiştir
İsimsiz bir uyarı yorumuyla araştırdığım vakit gördüm ki bazı karikatüristler blog sayfalarında karikatür paylaşanlara dava>>>
Oca
MATLAB – Error: Functions cannot be indexed using {} or . indexing.
data = get(z9).OutputData{1}; satırında aşağıdaki şekilde hata vermekteydi. Error: Functions cannot be indexed using {}>>>
Oca
“ERASMUS+ Yüksek Öğretim” konulu seminer notları
“ERASMUS + Yüksek Öğretim” konulu seminer notları Dr. Öğretim Üyesi Kemal TÜTÜNCÜ hocam tarafından sunulan>>>
Oca